| |
|||||||||
|
| |
|||||||||
|
 |
 |
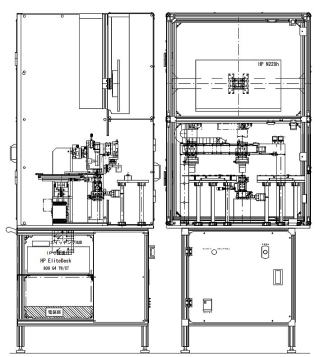
| 特徴 | |||
| LiDAR素子の内部を近赤外線カメラ、各種カメラを使用し複数回撮影して処理、検査します。 ディテクター部、ドライバー部、Pad部、ボンディング部、ワイヤー、カバーガラスなど段差があっても複数回撮影した画像をソフトウエアにて貼り合わせて見やすい画像に 変換し、コントラストの低い画像を見やすくする処理(エフェクト処理)をして見つけにくい欠陥部を検出します。 |
|||
| 対応ワーク |
|||
| 各種LiDAR素子の構造に合わせて設計、製作します。 複数機種にも対応可能です。 |
|||
| その他機能 | |||
| 供給、搬出部はパレットやコンベアに対応できます。 |
|||
| 性能 | |||
| ・欠陥検出能力: | ディテクター部欠陥 約10μm ドライバー部、Pad部、 ワイヤー部、ボンディング部、表面ガラス面 (検出能力は各客先の要望に応じて光学系の設計をします。) |
||
| ・検査時間: | 別途相談 |
||
| 各種機能を搭載可能 お問い合わせください。 |